PoKeys update 4.1.58 was just released with a few new features for PoKeys devices.
New features in PoKeys update 4.1.58
We changed the PoKeys update versioning scheme. We try to release both software and firmware for PoKeys devices with the same versions in order to improve the user experience. Until now, we based our versioning on PoKeys56 series device family that matured and are now being slowly replaced by PoKeys57 series devices. We will still keep the important updates for PoKeys56 coming to our users, but the development is now focused on PoKeys57 series devices that share the same firmware. For a while, updates to the PoKeys57 series firmware were made available as subversions (you may have noticed updates from 3.1.68a to 3.1.68i), which did not really fit into our idea of updates.
So, we jumped from 4.1.68i to 4.1.57 and now we present the update 4.1.58, which is available for download here: PoKeys v4.1.58, PoBlocks, Mach3 plugin (13.3.2016).exe
If you’re using Mach4, don’t forget to download the latest Mach4 plugin here: PoKeys Mach4 plugin 7.25.0.2914 + manuals (13.3.2016).zip. We included an updated manual for Mach4 with all new features described. We will be working on providing Mach4 tutorials for the beginners and advanced users.
What’s new in 4.1.58?
The update 4.1.58 brings some interesting new features to Pulse engine functionality
Homing algorithm customization
We received requests to improve the homing functionality of PoKeys devices and now we are presenting customizable homing algorithm. The algorithm now also supports homing using encoder index signal. Using encoder index for homing together with the updates in the synchronisation between external pulse generator and Pulse engine, PoKeys devices can now home extremely precisely.
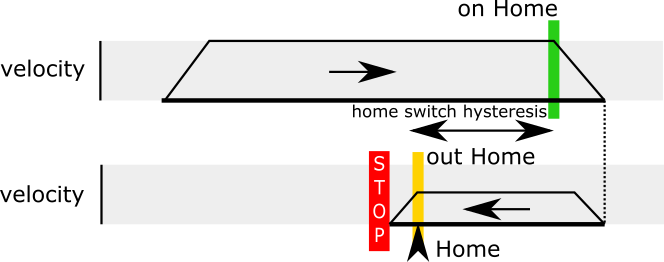
The algorithm is based on executing selected actions on different events:
- On Home event (home switch contact is detected) – this event happens when the machine touches and activates the home switch (configured in the options above)
- Out Home event (home switch contact is released) – this event happens when the machine backs off the switch or gets past the home switch.
On these two events, the combination of the following actions can be configured:
- Stop and reset the position (8) – this action marks last position as home position and commands the motion to stop. It also finishes the homing procedure for the axis
- Arm the encoder index for stop (4) – this action arms the encoder index input for the selected axis. On the next encoder index signal, the position of the axis is marked as home, axis is commanded to stop and the homing procedure for the axis is finished. Fast encoders index inputs 1, 2, 3 (pins 9, 10 and 11 on PoKeys57CNC and 9, 11 and 27 for other PoKeys devices) are used for axes 1, 2, 3, while ultra fast encoder index input is used for axis 4.
- Reverse direction (2) – reverse the homing direction
- Slow down (1) – slow down the homing speed to the reduced speed, as configured
Let us present some examples of the homing algorithm configuration – mode byte describes the actions of the ‘out home’ (first number) and ‘on home’ (second number) using the action codes above.
Polabs develop new Homing sensor, here you can find informations about Homing sensor (product).
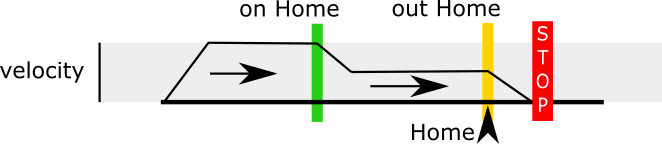
Default (mode 0x83): Slow-down and reverse on home, stop and reset position on home release
This mode was the default homing mode in PoKeys devices and is used when no valid configuration has been specified.
Forward home (mode 0x81): Slow-down on home, stop and reset position on home release
This mode differs from default mode 0x83 in the fact that the motion continues in the same direction with the reduced speed
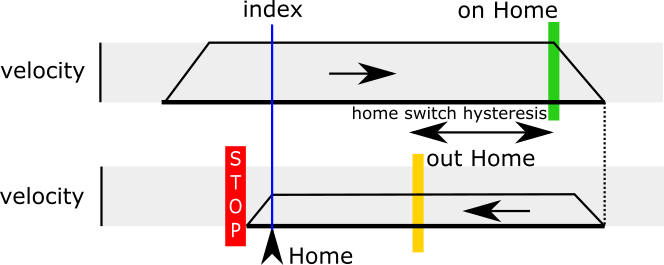
Encoder index based reverse (mode 0x43): Slow-down and reverse on home, arm encoder index on home release
This mode starts similarly to default mode 0x83, but arms the encoder index input on home release. When next encoder index event is detected, homing is stopped and position is reset. One can also configure the encoder arm action on the ‘on home’ event, which will arm the encoder together with slow-down and direction reversal.
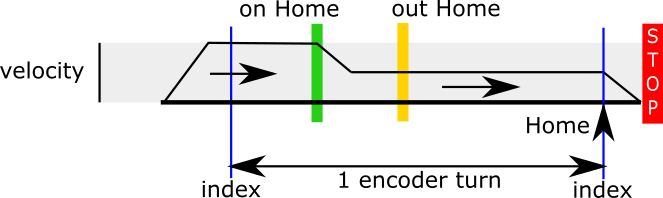
Encoder index based forward (mode 0x41): Slow-down, arm encoder index on home release
This mode is similar to previous (mode 0x43), but without the motion reversal. Encoder can be armed either on ‘on home’ or ‘out home’ events.
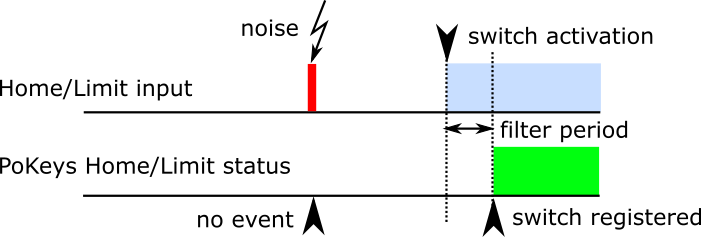
Input filters for home and limit signals
PoKeys device can now filter home and limit signals in order to deal with the electrical noise in these signals. The filter period is configurable from 0 to 25.4 ms in 0.1 ms steps.
Chargepump output pin selection
PoKeys generates 5 kHz chargepump signal when the Pulse engine is in specific states (some states can be additionally enabled besides ‘Running’). This signal can be used to enable power to motor drivers. The idea is that the power supply to the motors is cut-off if motion controller hangs. PoKeys devices used a predefined pin for the chargepump output functionality, but we decided to make this configurable in order to support various machine configurations and new PoKeys devices.
Fast encoder index inputs on PoKeys57CNC
PoKeys57CNC device did not support fast encoder index input signals due to a limited number of available general-purpose pins. In order to support homing on the encoder index, three pins have been defined on the Pendant connector – PoKeys pins 9, 10 and 11 (instead of 9, 11 and 27, as were used in PoKeys56 and other general-purpose PoKeys57 series devices).
Also if you need information about stepper motor driver, here is complete explanation – stepper motor driver.
- Bipolar stepper motor driver – PoStep25-256
- Plasma voltage divider,
- Plasma cutter troubleshooting device
- 4th axis for CNC
Related Posts